Trapo will showcase its robot solutions at interpack 2026
posted Friday 24 April 2026
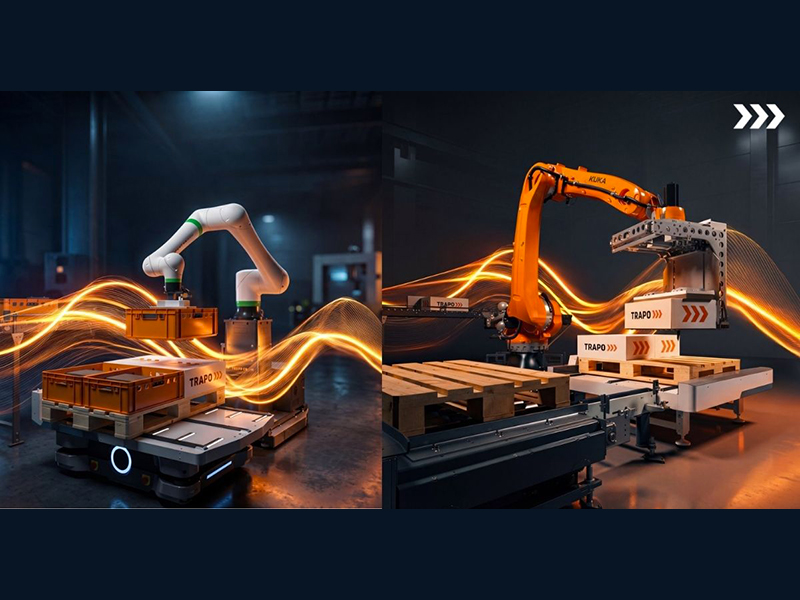
At this year’s interpack, Trapo will demonstrate reusable crate and carton handling. The system is based on the synchronous interaction of two articulated-arm robots, which, thanks to intelligent control, harmonize perfectly with the conveyor technology and autonomous robot (AMR) for pallet handling.
At its 195 m² exhibition stand in Düsseldorf, the globally successful medium-sized company Trapo is focusing on the handling of reusable crates and cartons weighing up to 35 kg. The two articulated robots are specifically a cobot from the TCP series and a high-speed robot system. Whilst the cobot is equipped with a low-maintenance suction gripper, the actor from the powerful HRS series operates with a fork gripper. The two systems alternately palletize and depalletize the crates and boxes fed onto longitudinal and transverse pallets – a challenging task that requires the highest precision when stacking the crates precisely into one another. In the live application, the switching between full and empty pallets is handled by a flexible robot, which also acts autonomously and in the smallest of spaces.
From conveyor technology right through to AMR and robots, all line modules are connected via Trapo Intelligent Management. Acting as the ‘digital backbone’, this smart software tool coordinates processes, supports monitoring and records process data in real time. This makes key performance indicators for plant availability (OEE) visible, process statuses transparent and optimization potential systematically accessible. Sophisticated sensors and control logic ensure a regulated, efficient, economical and, above all, safe process.
One standout option from this product range is, for example, the Trapo Cobot Palletizer, a performance model offering an easy entry into automated palletizing. Delivered on just two pallets, this mobile robot colleague from the TCP series can be used wherever its palletizing performance is required.
To learn more:



